GWS IQ-220BB - Servo Hack
Heute sind meine 4 Servos für den TetraBot eingetroffen. Sie werden später dem Roboter zu einem omni-direktionalen Antrieb verhelfen.
Ich habe mich für folgenden Typ entschieden:
GWS IQ-220BB von Hype RC
Technische Daten
Section titled “Technische Daten”- Stellkraft:
- 4,8V: 42 Ncm
- 6,0V: 48 Ncm
- Stellzeit (60°):
- 4,8 V: 0,10 s
- 6,0 V: 0,08 s
- Umdrehungen / Minute:
- 4,8 V: upm = 60 / (0,10 s * 6) = 100
- 6,0 V: upm = 60 / (0,08 s * 6) = 125
- Größe L x H x B: 30,86 mm x 28,5 mm x 16,2 mm
- Gewicht: 19 g
- Kunststoffgetriebe
- Kugellager
Umbau Anleitung
Section titled “Umbau Anleitung”Um die Servos als Antrieb nutzen zu können, müssen sie für eine Rotation um 360° statt 90° modifiziert werden.
Hier eine kleine Anleitung dazu:
-
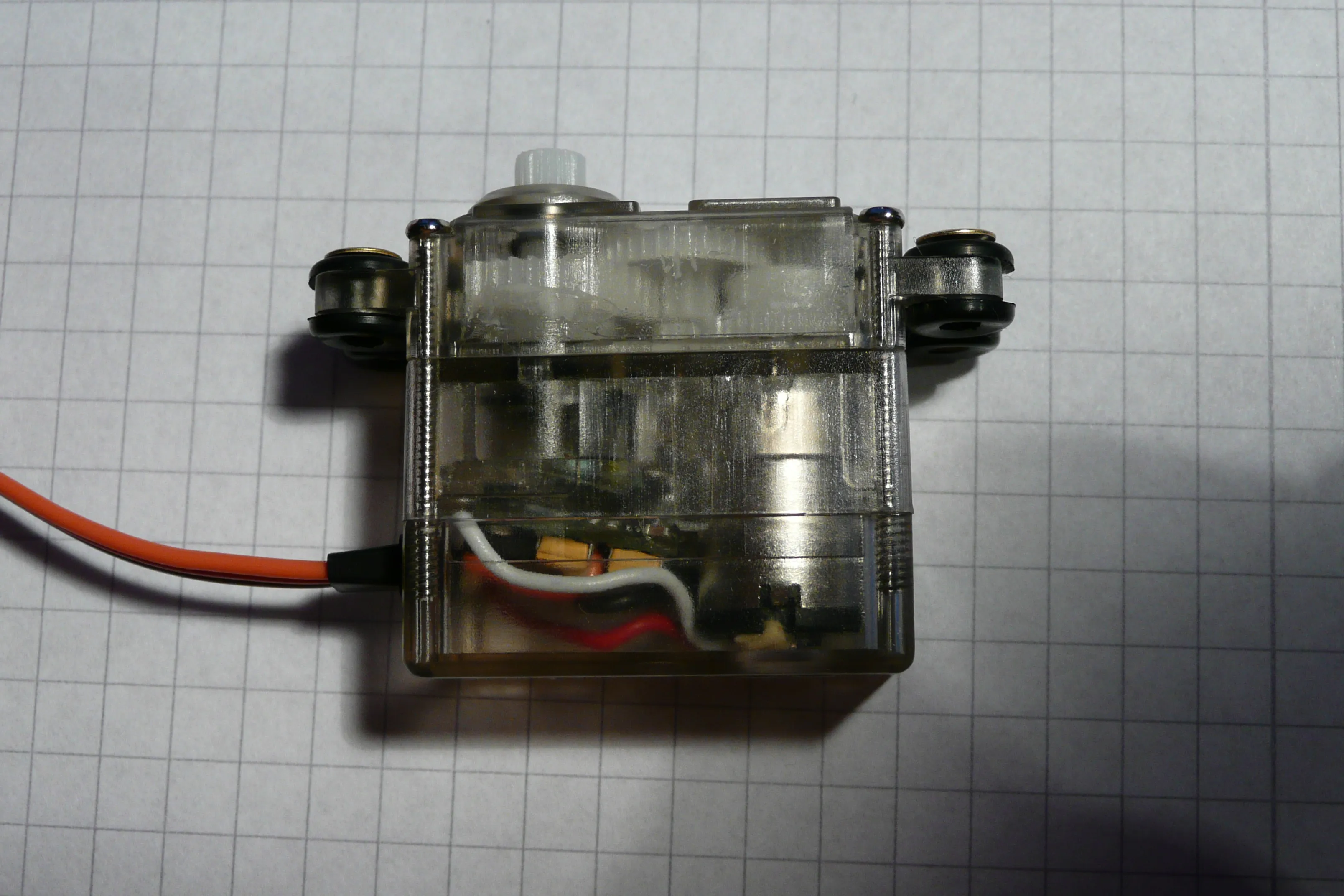
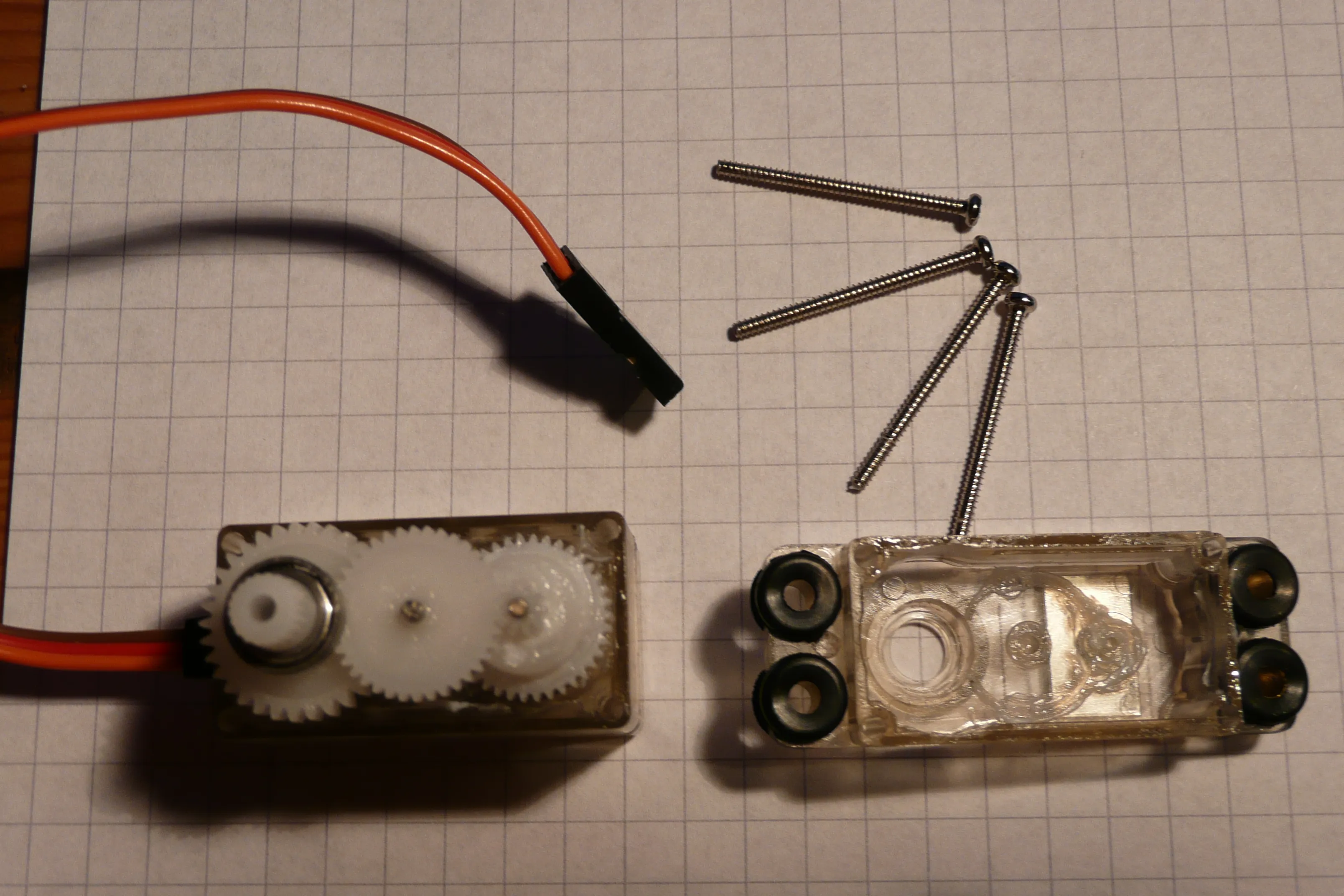
Servogehäuse öffnen

Geöffneter GWS IQ-220BB Servo. Wie jeder Servo lässt sich auch der IQ-220BB über die vier Schrauben am oberen Gehäuserand öffnen. Das Servo Gehäuse besteht aus drei Teilen. Jeweils ein Teil bedeckt die Elektronik beziehungsweise das Getriebe. Das dritte Teil enthält den Motor und die Lagerung für das Getriebe.
Beim Öffnen des Servos sollte man sich ein sauberes Plätzchen suchen, um das Getriebe sauber zu halten.
-
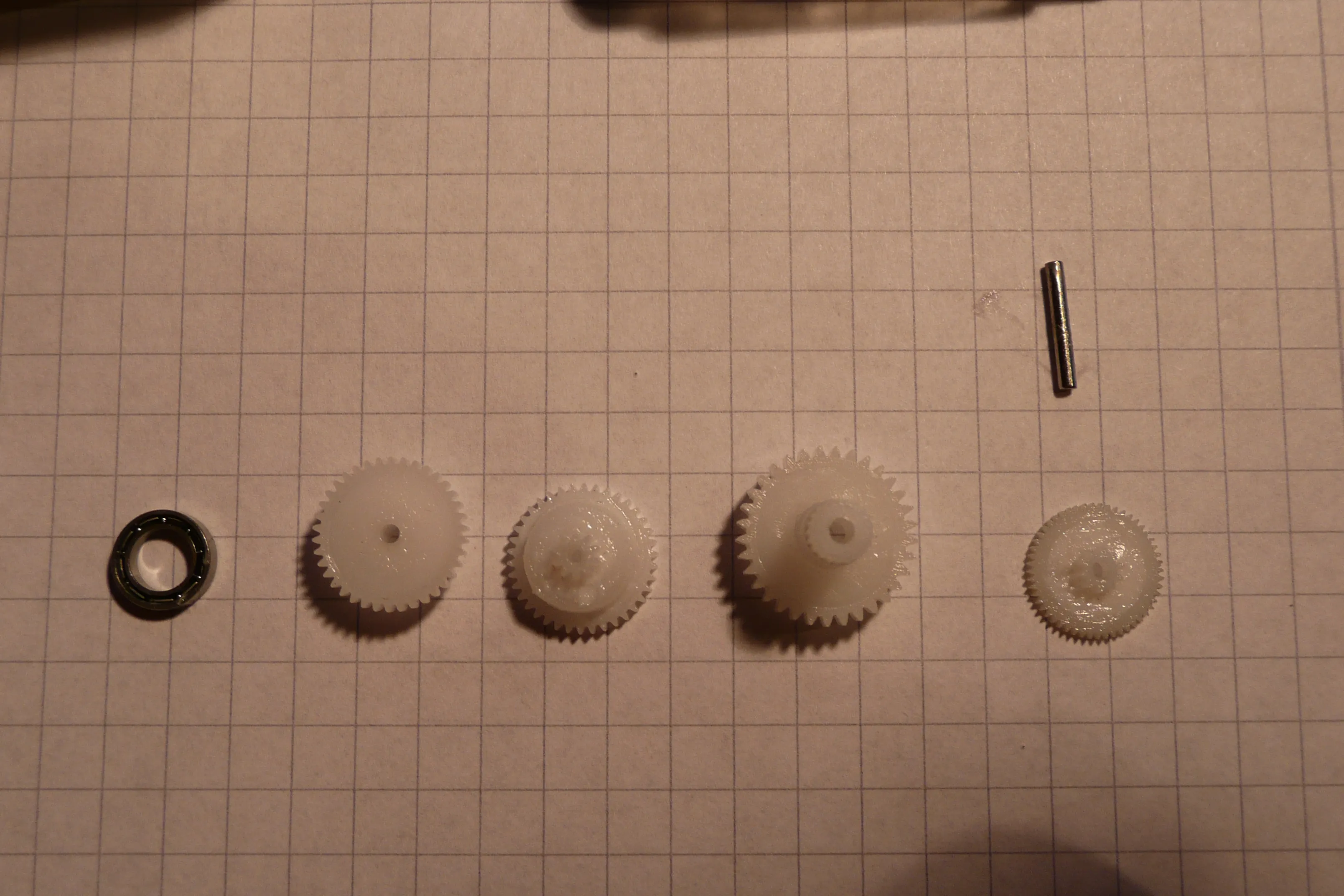
Getriebe entfernen
Beim Entfernen des Getriebes sollte man auf die Anordnung der Zahnräder achten um diese beim Zusammenbauen wieder korrekt anordnen zu können. Lagert die Zahnräder am besten auf einem sauberen Papier.
Achtet auch darauf das Kugellager nicht zu Vergessen 😉!
-
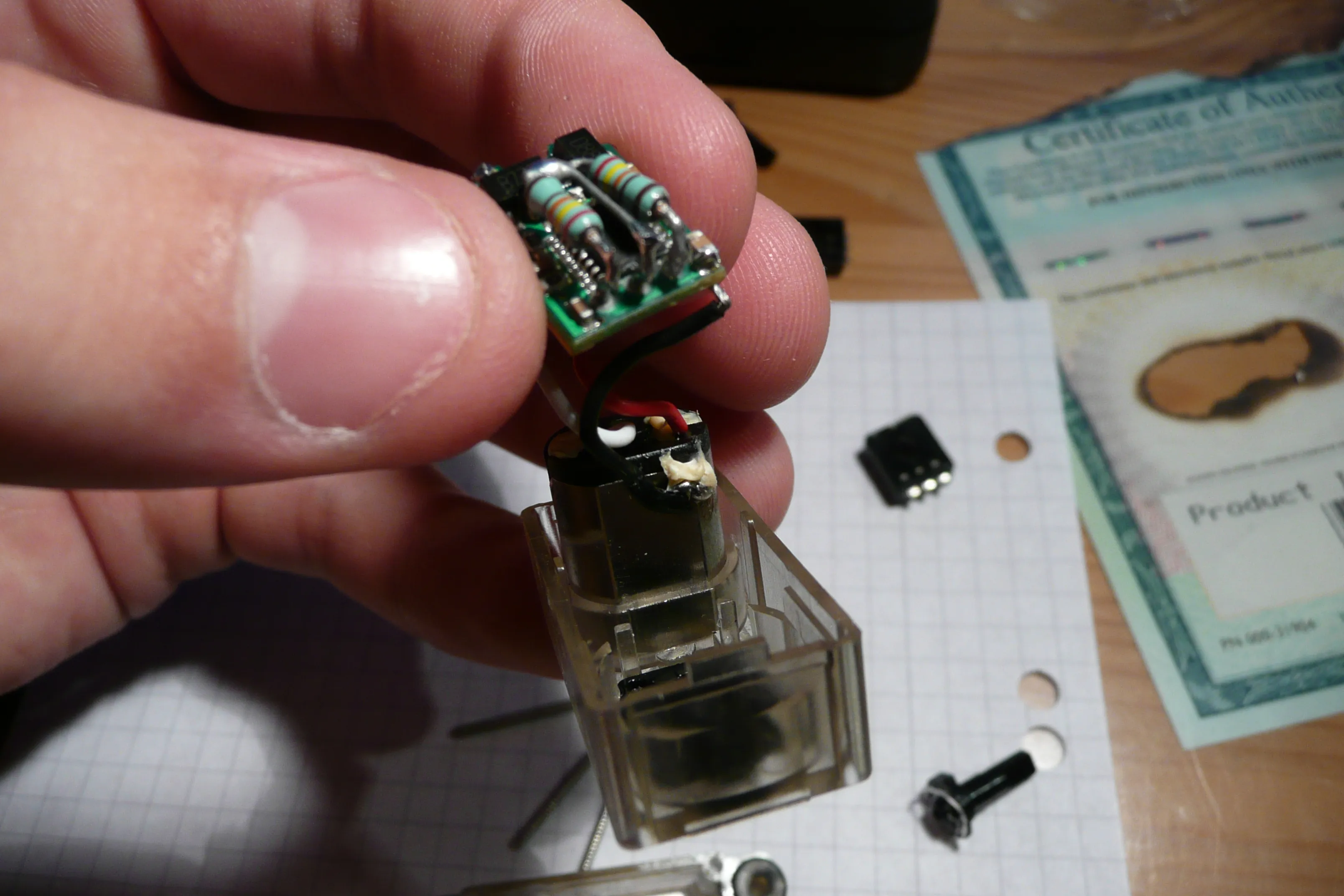
Potentiometer entfernen

Entferntes Potentiometer. Nun zum ersten schwierigeren Schritt. Ihr müsst das Potentiometer des Servos durch das größte Gehäuseteil drücken, sodass es aufbricht und sich entfernen lässt. Dazu kann es nötig sein etwas mehr Kraft aufwenden zu können. Achtet darauf, dass ihr die Motorwelle nicht beschädigt!
Der Rest des Potentiometers müsste noch an die Elektronik gelötet sein. Knipst das Poti am besten möglichst nah am Gehäuse ab um die Beine des Potis später als Lötstelle für die Widerstände nutzten zu können
-
Abtriebzahnrad modifizieren
Abtriebszahnrad mit entfernten Nasen. Das Antriebszahnrad besitzt zwei kleine “Nasen” die die Rotation um 360° verhindern. Diese müssen am besten mit einem scharfen Teppichmesser entfernt werden. Achtet darauf die Zähne nicht zu beschädigen und nichts überstehen zu lassen.
-
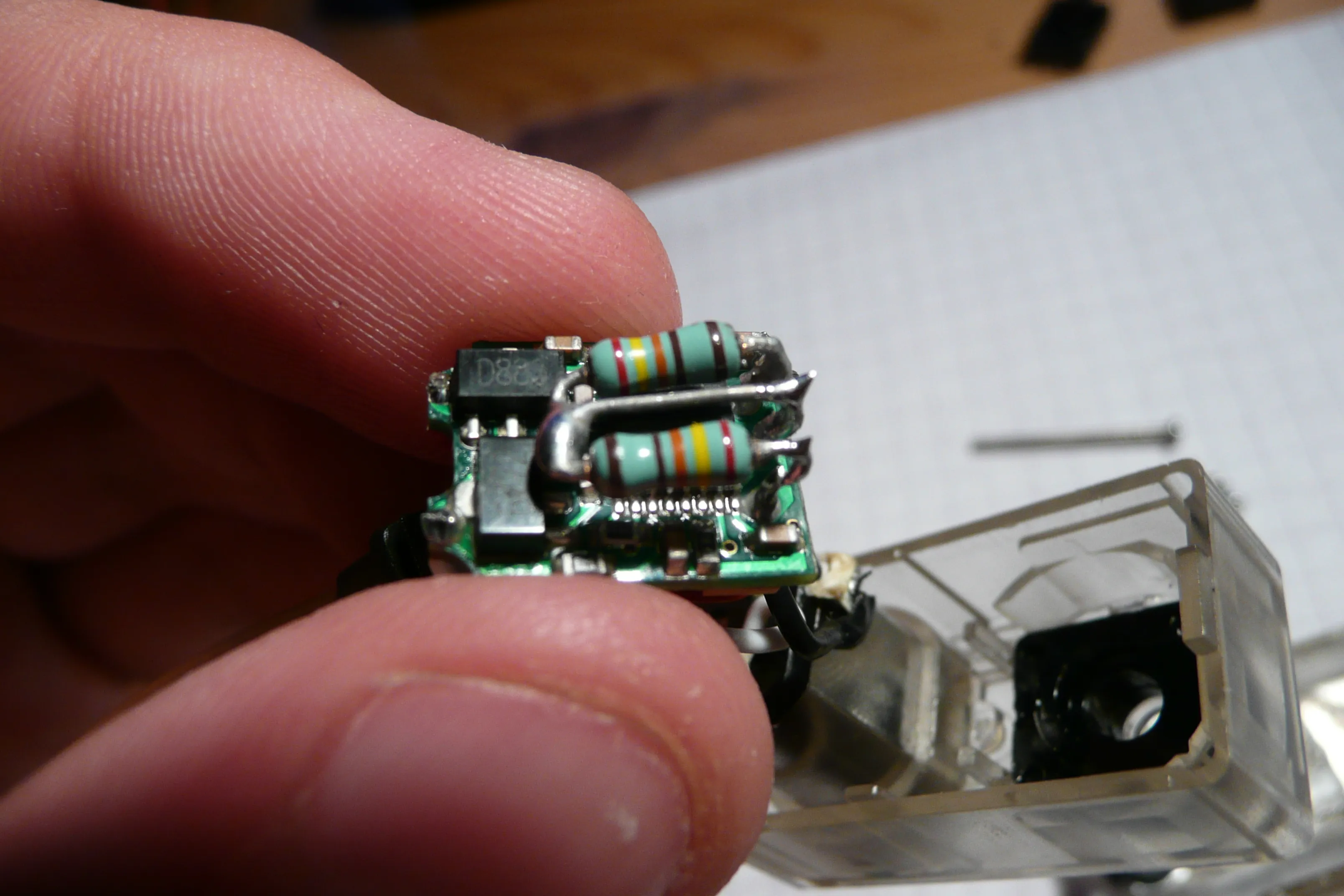
Widerstandsnetzwerk verlöten
Das Potentiometer wird durch ein einfaches Widerstands Netzwerk ersetzt. Der Gesamtwiderstand des Potis beträgt 5 kOhm. Zwei 2,5 kOhm Widerstände müssen also jeweils vom mittleren Poti-Pin zu einem der äußeren Pins verbunden werden. Die übrig gebliebenen Poti-Beinchen eigenen sich ideal als Lötstellen.
-
Servo zusammenschrauben & testen
Nun könnt ihr das Servo wieder zusammenbauen. Geht dabei genauso wie beim Öffnen vor.
Beim ersten Test an eurer RC Anlage solltet ihr genauer auf das Getriebe achten um eventuelle Geräusche und Schäden am Getriebe zu erkennen.
Galerie
Section titled “Galerie”