The lectures during my last semester were largely focused on digital image processing.
Combining this with the inspiration for 3D printing, I gathered through my trip though South Korea, resulted in the following seminar paper.
Seminars are a compulsory part of our curriculum which I like due the self-contained work and the ability to pick an individual topic.
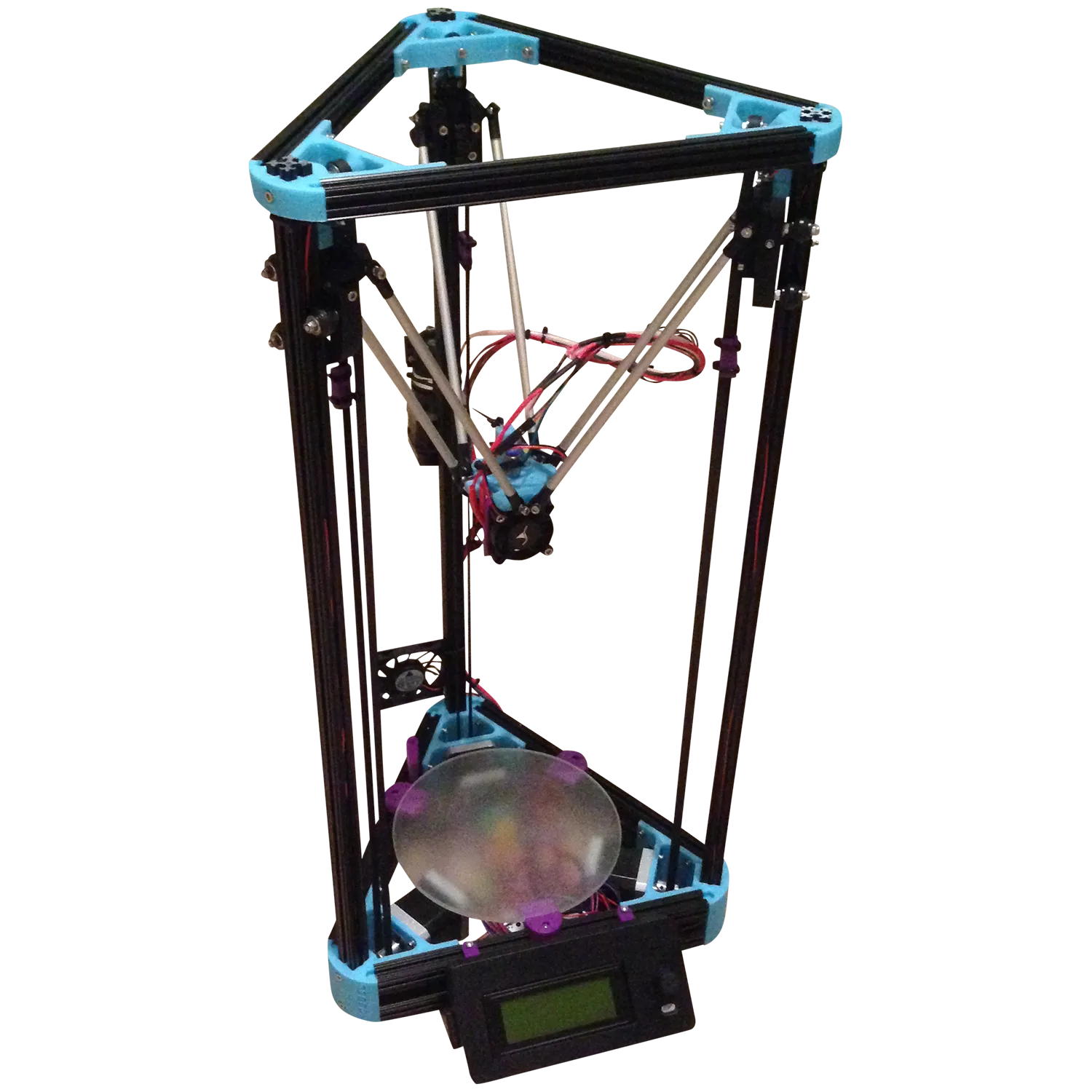
Over the past year, I’ve built my own Kossel 3D printer.
The Mini Kossel is based on a novel parallel delta kinematic which was developed by Johann C. Rocholl, a Google engineer from Germany.
This paper is targeting the automation of solder paste dispensing onto printed circuit boards by using computer vision and RepRap robots.
Während dieser Pflichtveranstaltung sollten wir die Lerninhalte der Vorlesung “Mathematische Methoden der Elektrotechnik” durch Steuerung von LEGO Mindstorms NXT Robotern unter MATLAB vertiefen.
Das Projekt ist eine Pflichtveranstaltung im ersten Semester meines Studienganges (Elektrotechnik, Informationstechnik und Technische Informatik) und wird durch alle Lehrstühle unserer Fakultät als 10-tägige Blockveranstaltung vor Weihnachten durchgeführt.
Ich wurde dem Institut für vernetzte System (MOBNETS) zugeteilt.
Etwas verwundert war ich dann am ersten Tag, als wir auf Englisch begrüßt wurden.
Aber naja, später werden wir vermutlich sowieso dazu gezwungen werden.
Während der ersten Woche lernten wir die eigens für das Projekt entwickelte “RWTH Mindstorms NXT-Toolbox” kennen und haben an einigen vorgegebenen Versuchen gearbeitet.
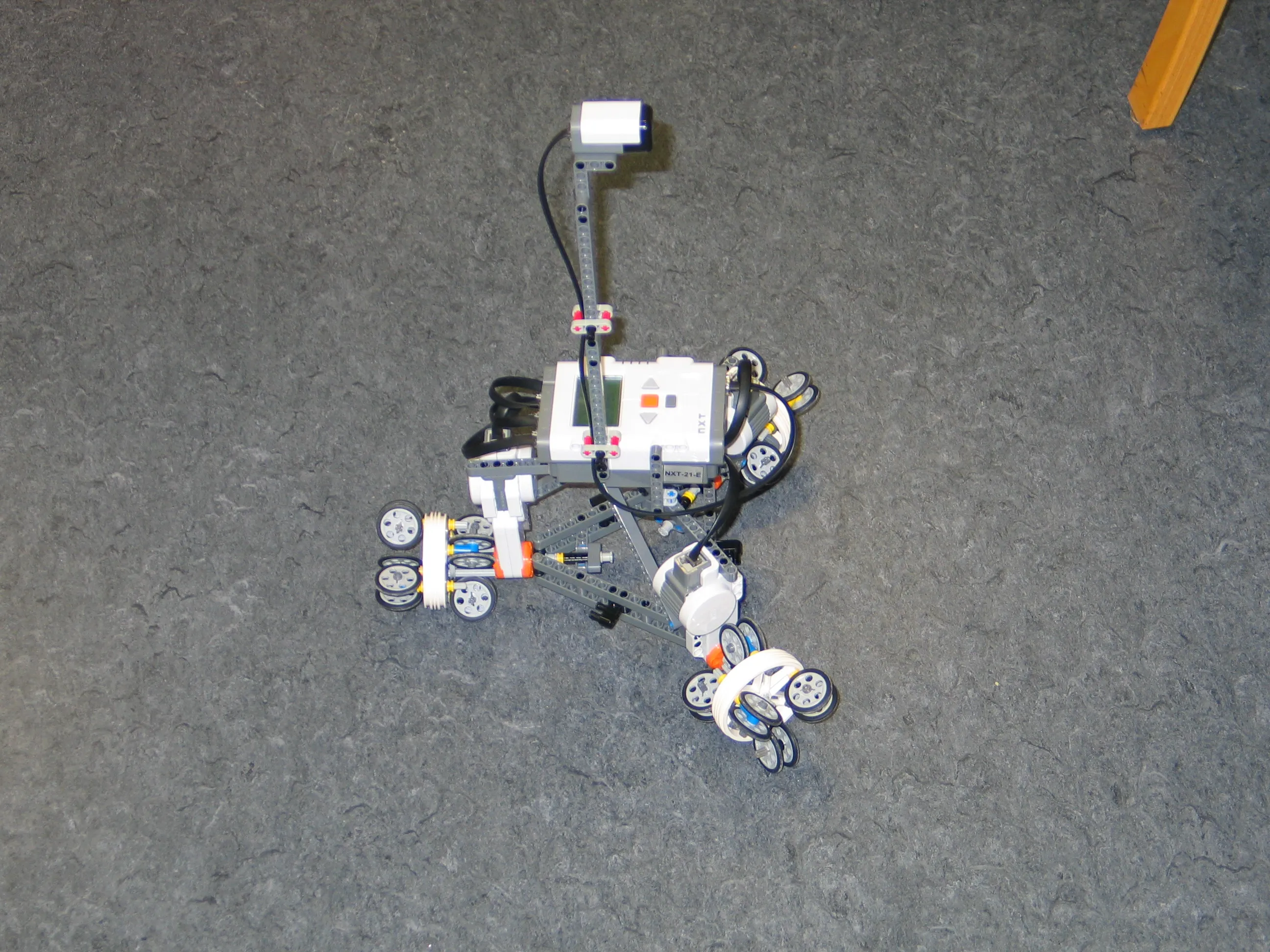
In der zweiten Hälfte des Projektes durften wir dann in einem Wahlversuch selber kreativ werden und einen eigenen Roboter konstruieren.
Meine beiden Kollegen und ich haben uns für einen Roboter mit omni-direktionalem Antrieb entschieden.
Das Prinzip dieses etwas außergewöhnlichen Antriebes wird das folgende Video deutlich.
Die Konstruktion der “Omniwheels” war komplizierter als Anfangs angenommen.
Dafür sind wir glücklicherweise recht schnell auf den nötigen Zusammenhang zwischen Fahrtrichtung und den drei Motorgeschwindigkeiten gekommen.
Als Projektabschluss mussten alle Gruppen ihren Roboter präsentieren.
Unsere Präsentation gibt es hier:
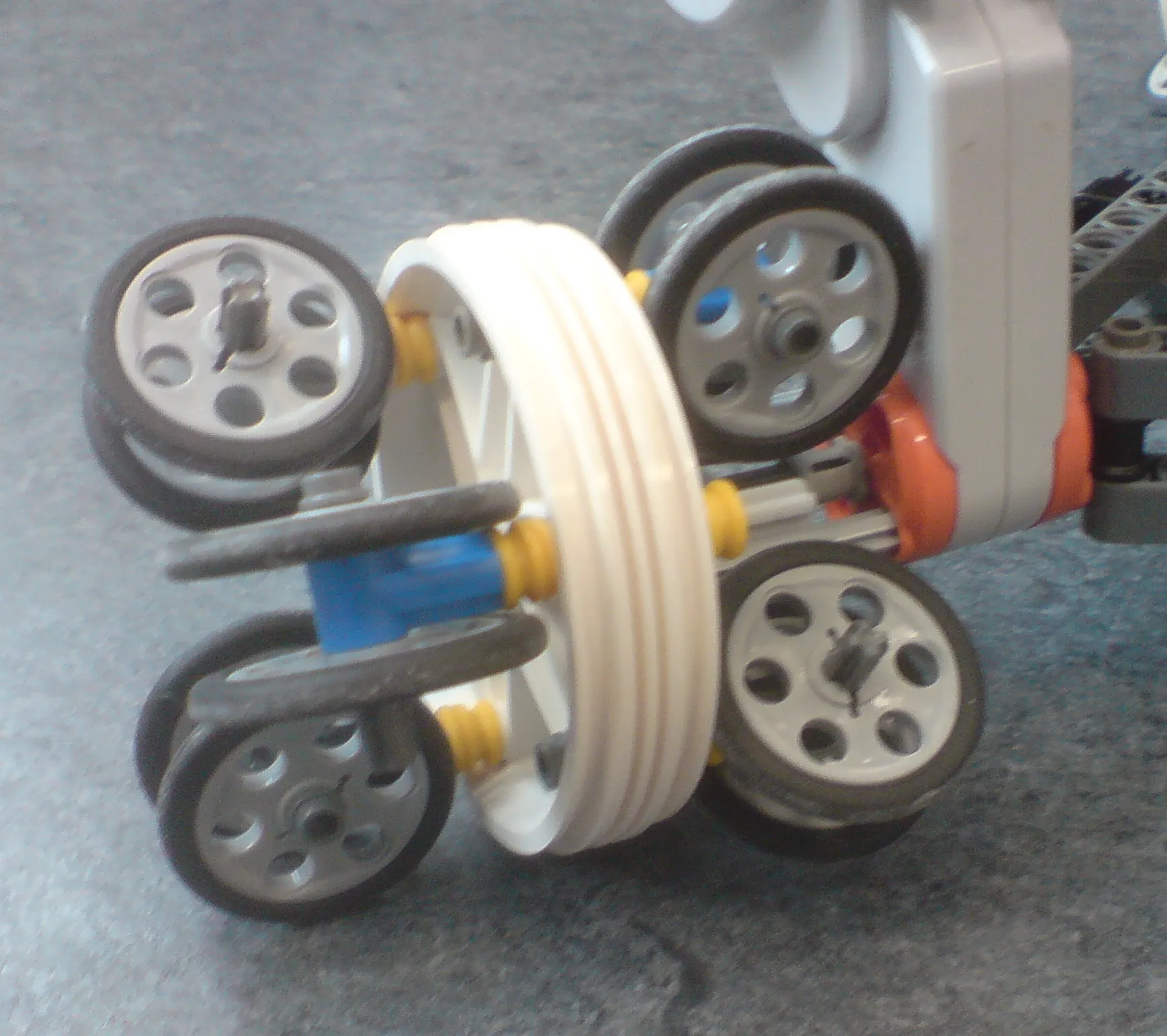
Der TetraBot soll sich effektiv und schnell bewegen können.
Das gelingt ihm am besten durch einen Omnidirektionalen Antrieb.
Dieser basiert auf speziellen Rädern, den “Allseitenrädern“, die ich euch hier vorstellen werde.
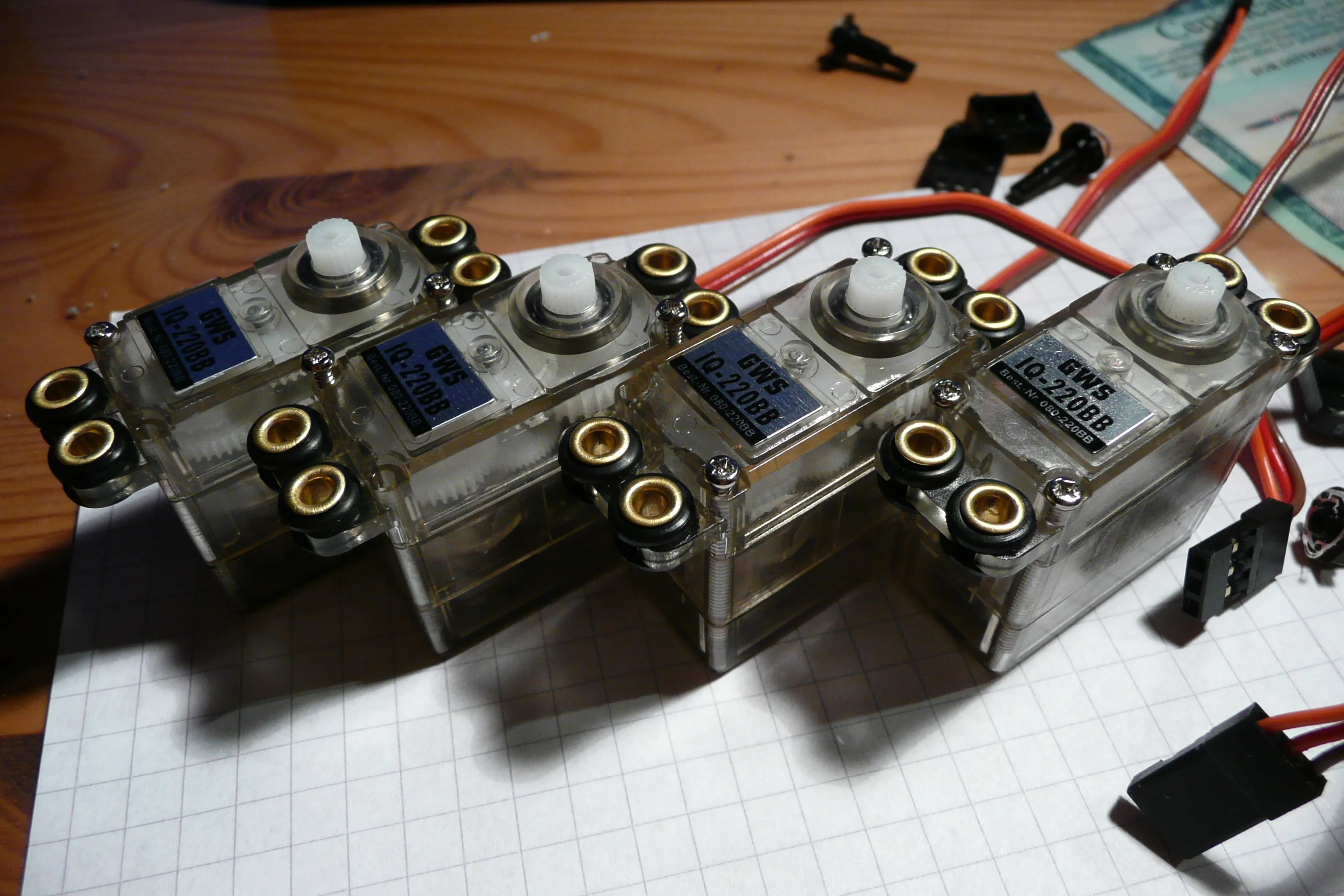
Die dafür nötigen Servos habe ich in einem anderen Beitrag bereits gemoddet.
Raul Rojas and Alexander Gloye Förster verfassten auch eine wissenschaftliche Arbeit zum omni-direktionalen Antrieb.
Kommerzielle Omniwheels gibt es hier: www.omniwheel.com.
Preislich liegen sie aber nicht in meinem Bereich und sind wegen der hohen Portokosten auch gleich ausgeschieden…
Also hab ich mich selber ans Werk gemacht.
Preislich bin ich mit meiner Variante bei ca 10 € für alle vier Räder gelandet.
In den letzten vier Wochen war ich viel unterwegs.
Zunächst verbrachte ich zwei Wochen in Spanien, genauer gesagt in Andalusien.
Direkt im Anschluss ging es weiter nach Grönland, wo ich eine Woche mit dem Schiff entlang der Westküste Grönlands unterwegs war.
In diesen Blogbeitrag möchte ich über diese Reisen berichten und außerdem einen Ausblick auf mein nächstes Projekt im Bereich Robotik geben.