volkszaehler.org Zählerbox
Das volkszaehler.org Projekt nähert sich mit großen Schritten seiner ersten stabilen Version und damit dem ersten Release.
Ich möchte hier nur einen kurzen Überblick über den aktuellen Stand geben. Du kennst das Projekt noch gar nicht? Weiß nicht was Smart-Meter sind? Da steigst du besser auf unsere Projekt Website ein!
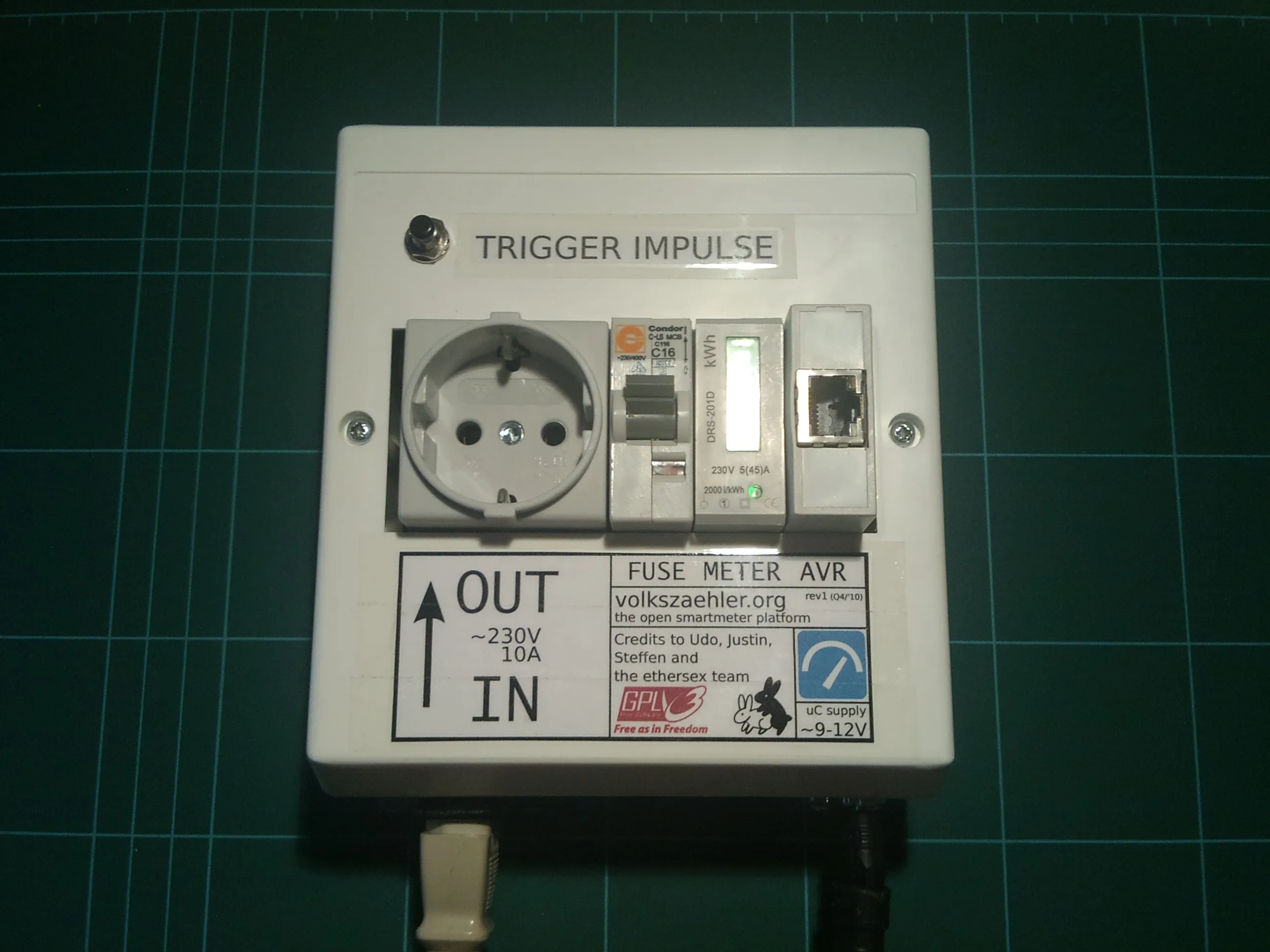
Für die Entwicklung am Projekt habe ich mir eine kleine Hutschienenbox gebaut. Sie eignet sich perfekt für den mobilen Einsatz und zum Testen neuer Firmware und Funktionen. Mal schnell den Verbrauch des eigenen Kühlschranks zu erfassen ist kein Problem. Derzeit ist mein Schreibtisch an die Box angeschlossen und liefert so aktuelle Daten für die Demo Installation des Projektes.
Die Box enthält folgende Komponenten:
- ~230V Eingang über Kaltgerätestecker (geerdet, max. 10 Ampere)
- ~230V Ausgang über Schukostecker (geerdet, max. 16 Ampere)
- Sicherungsautomat (Ein-/Ausschalter)
- B&G E-Tech DRS-154D S0-Zähler (einphasig, 2000 Impulse/kWh)
- Udo’s S0-Server (basierend auf Atmel AVR’s & ethersex, 10 Mbit/s Ethernet, TFTP Bootloader)
- Knopf zum manuellen Triggern von Impulsen
- externer Anschluss von Zählern