Nun habe ich auch angefangen zu twittern - gehört sich ja eigentlich, bei meinem Namen 😉.
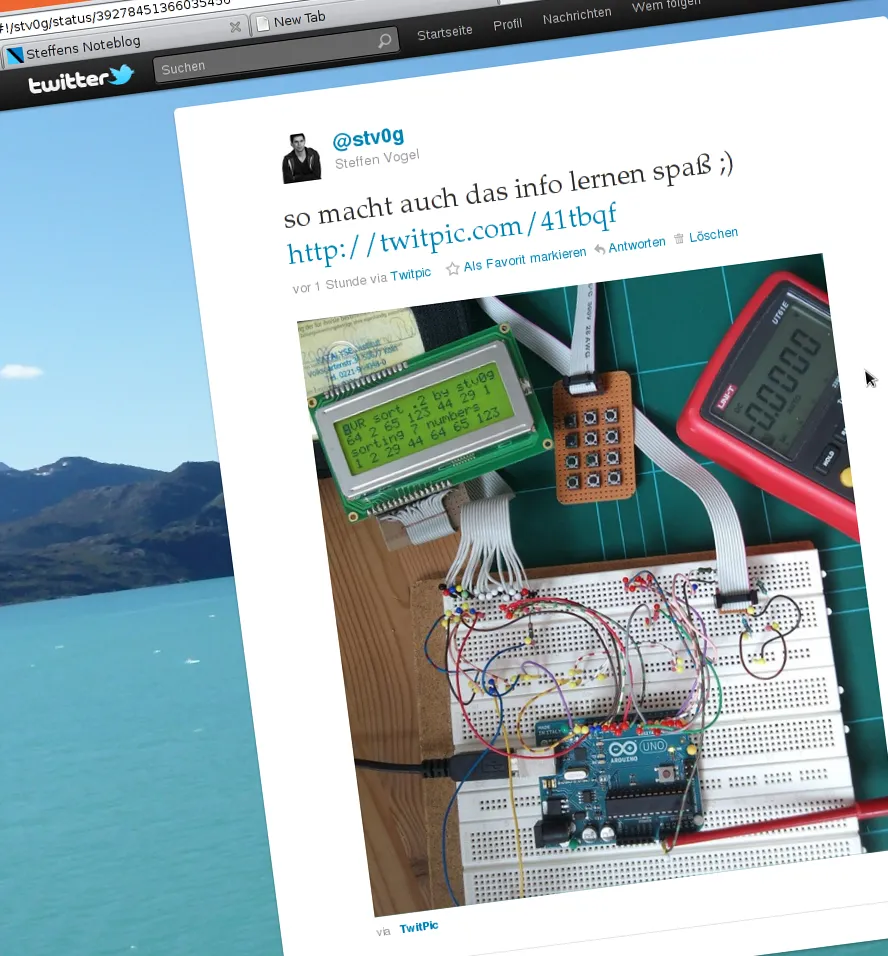
Nun habe ich auch angefangen zu twittern - gehört sich ja eigentlich, bei meinem Namen 😉.
MMET: Das steht für Mathematische Methoden der Elektrotechnik und ist die erste Klausur meines Studiums. Glücklicherweise dürfen wir ganz offiziell einen “Spicker” benutzen. Ein DIN A4 Blatt beidseitig. Gedruckt oder handgeschrieben.
Es geht hauptsächlich um Signale, Systeme, FIR-Filter und Fourier Transformationen. Ich habe mir für die Klausur mal alle Definitionen mit LaTeX zusammengetragen. Das Formelblatt gibt es auf uni.ist.hirnlos.net.
Morgen ist die Klausur. Vielleicht können ja die folgenden Jahrgänge etwas damit anfangen 😉.
Die LaTex Version gibt es auf Anfrage…
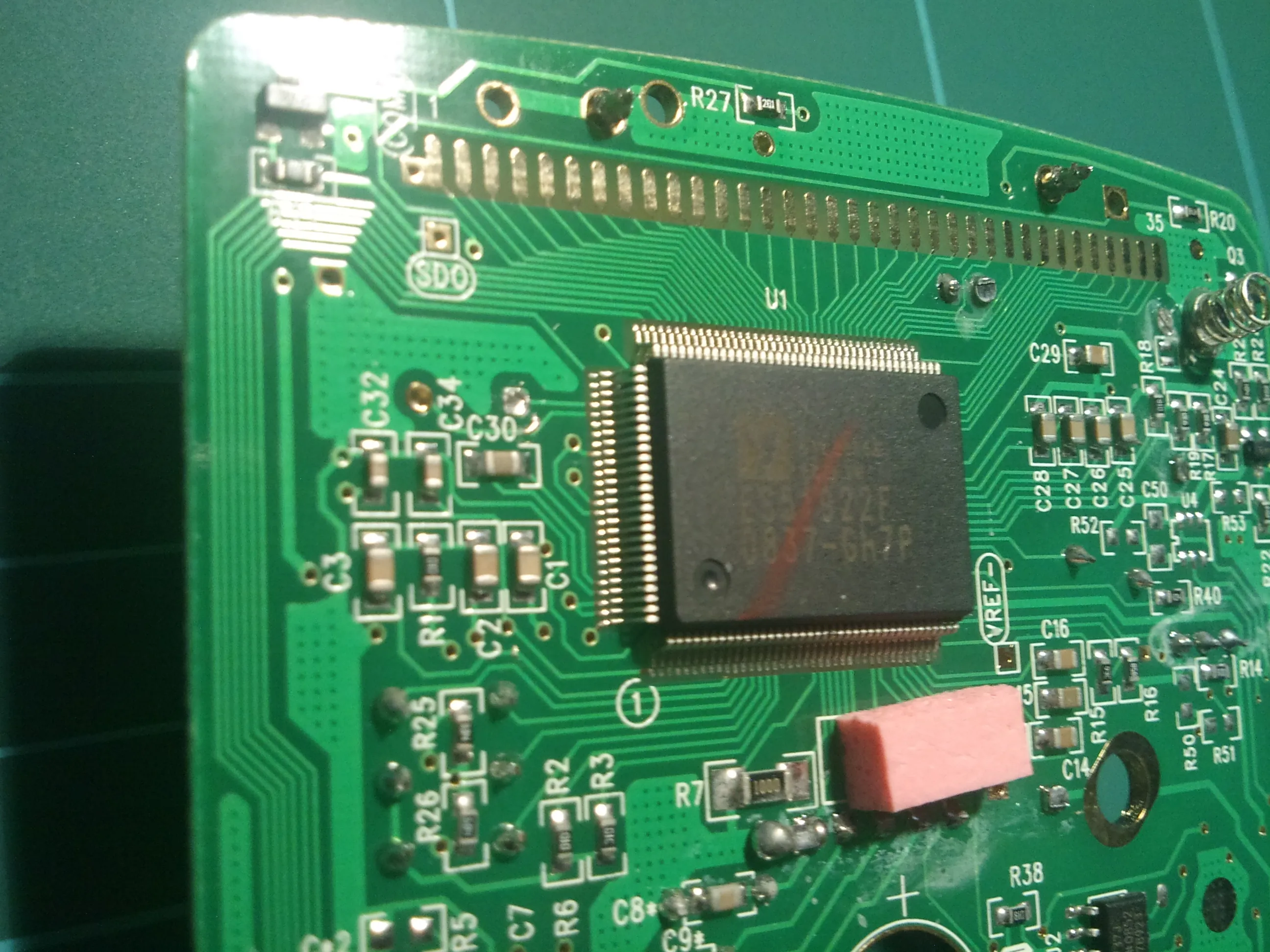
Ole hat mich in einem älteren Beitrag auf das Innenleben des “UNI-TREND UT61E Digital Multimeter” aufmerksam gemacht. Ole suchte nach einer Möglichkeit die serielle Datenübertragung zu deaktivieren. Ich schlug vor das Multimeter zu öffnen und nach einem Datenblatt des verwendeten IC’s zu suchen.
Das Multimeter besitzt einen Cyrustek ES51922P (P für Peak, Datenblatt ist verlinkt). Dessen Funktionalität geht etwas über die angegeben Features des UNI-TREND UT61E hinaus. So könnte man durch kleinere Modifikationen auch noch Temperatur messen, das Multimeter kalibrieren oder als Frequenzzähler nutzen.
Da ich derzeit diese Funktionen nicht benötige, entschied ich mich erst einmal hier nichts zu modifizieren. Aber vielleicht ist ja jemand Anderes auf der Suche nach genau diesen Features..
Das Datenblatt ist in verständlich in Englisch verfasst und enthält auch eine Spezifikation des seriellen Protokolls. Es ergänzt so die von Henrik Haftmann erarbeitete detaillierte Beschreibung des Protokolls,
Hier noch eine paar Bilder der Innereien (man könnte sie fast zum Nachbau verwenden 😉).
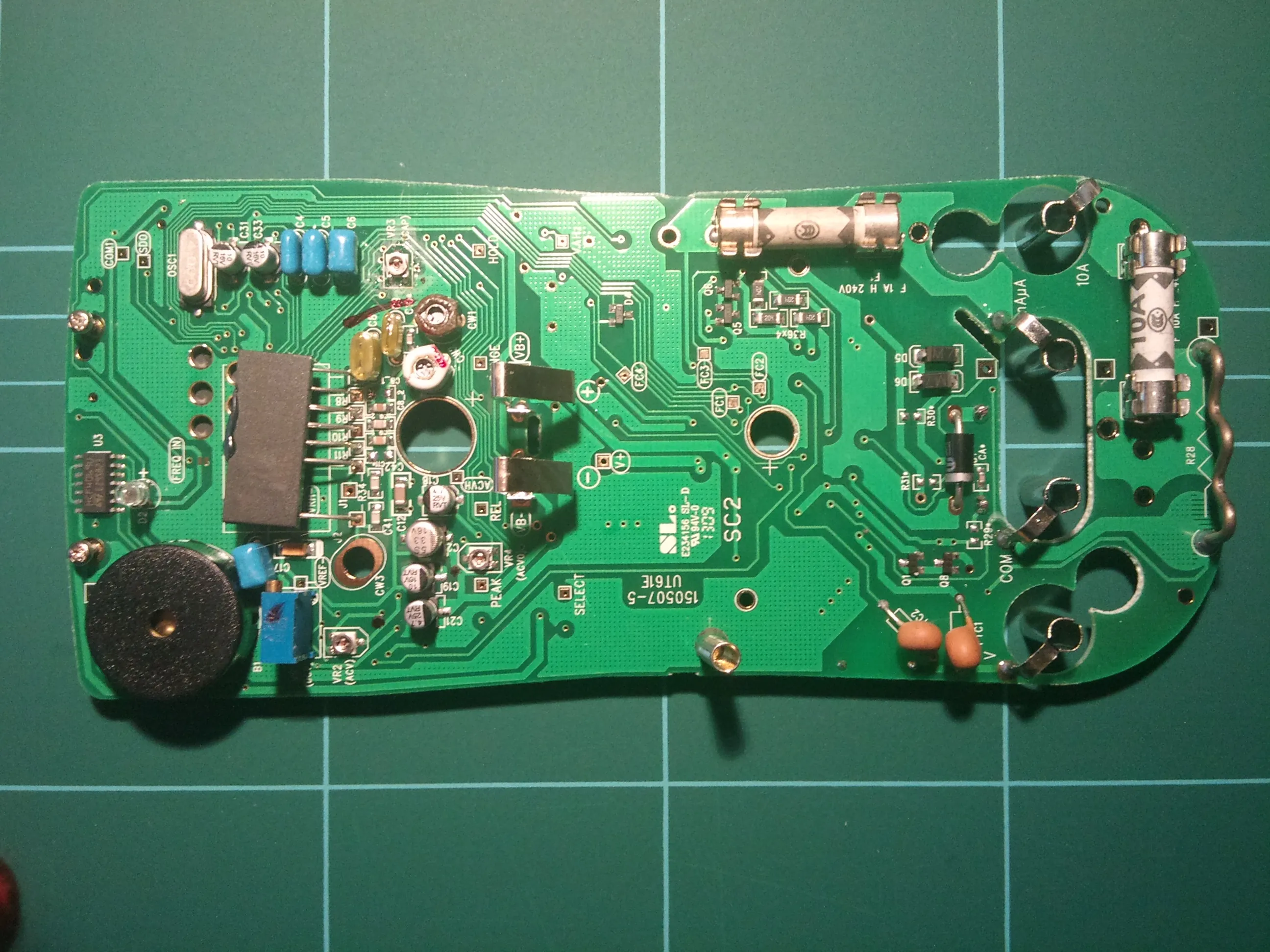

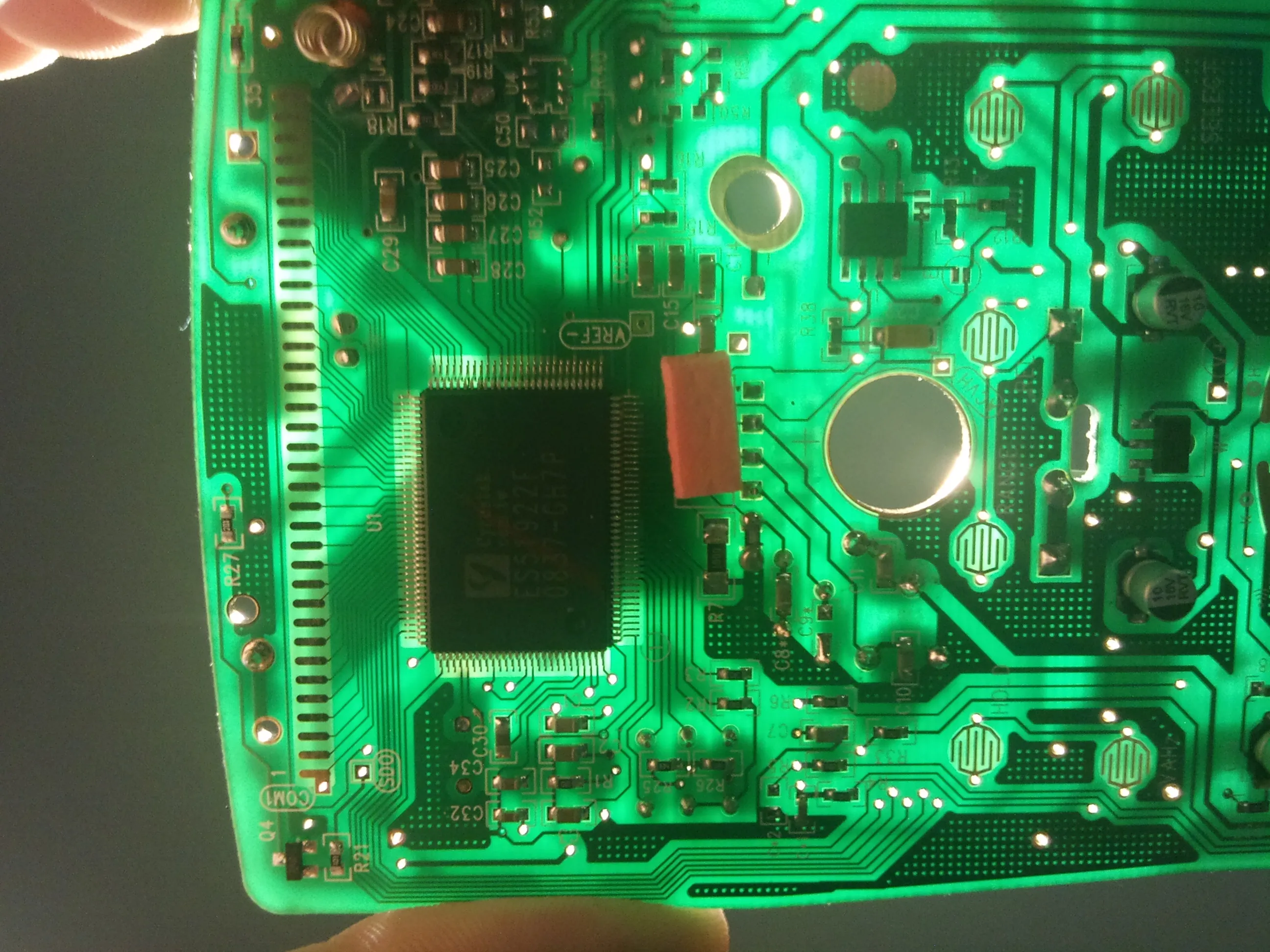
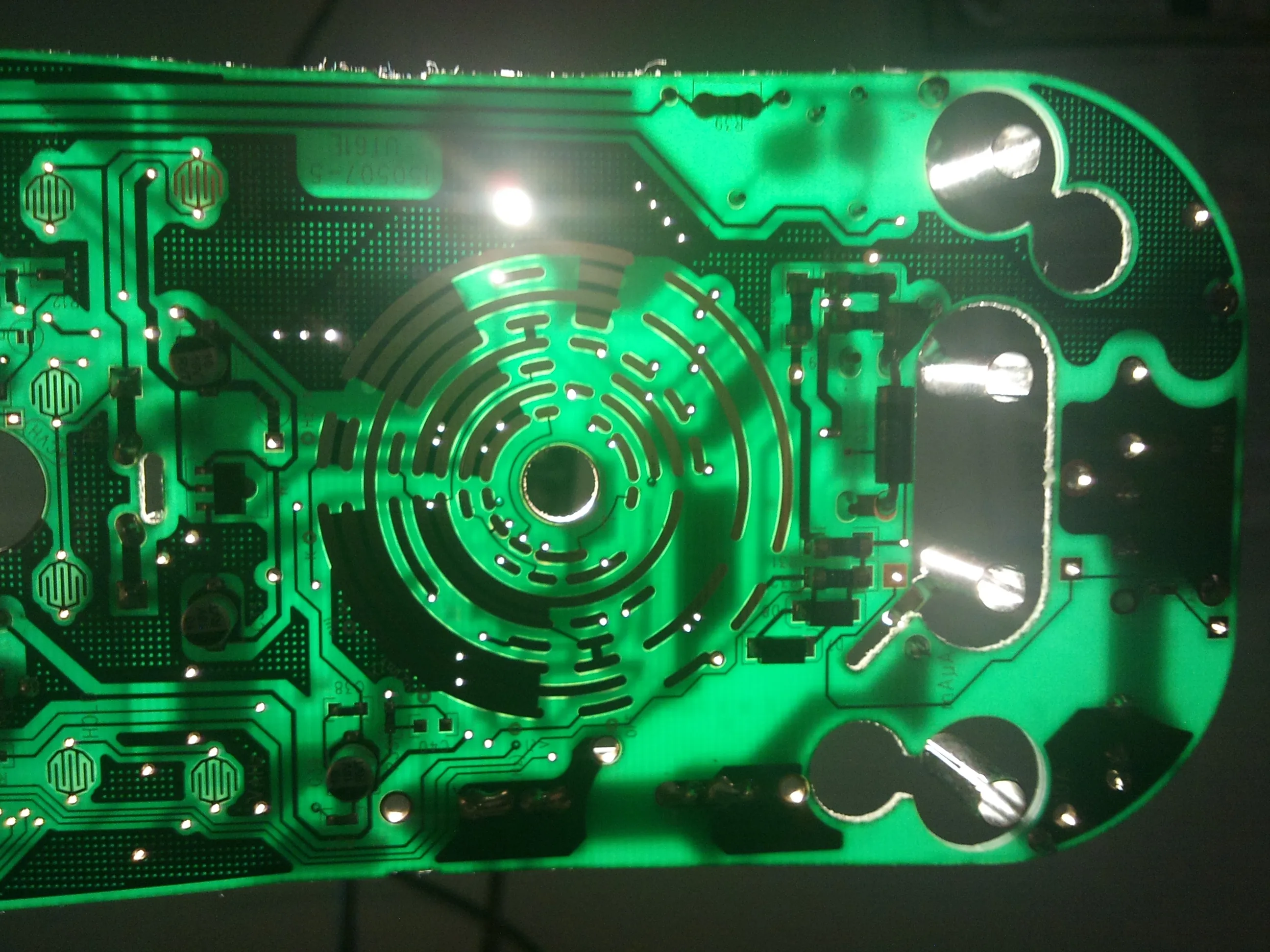
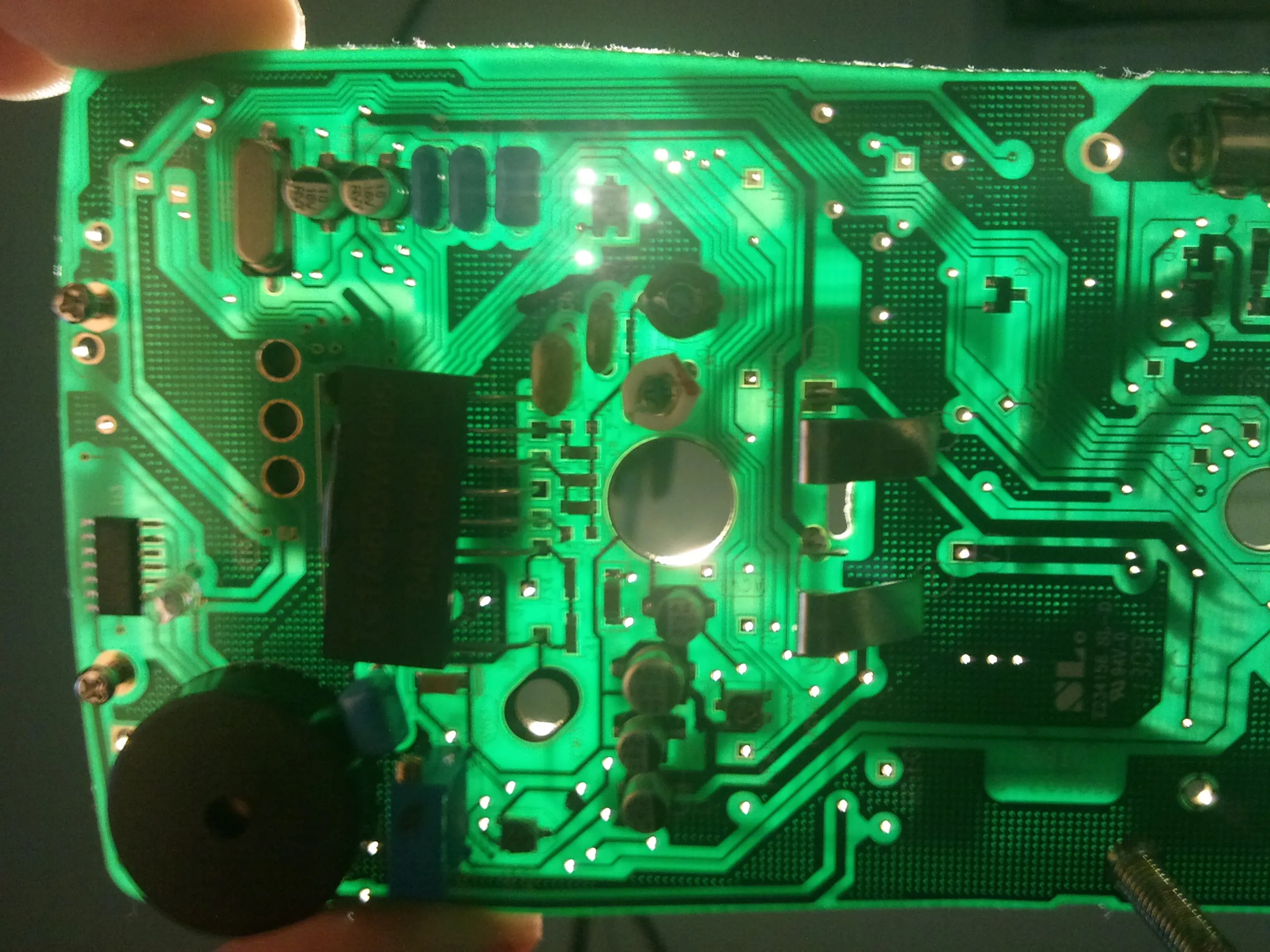

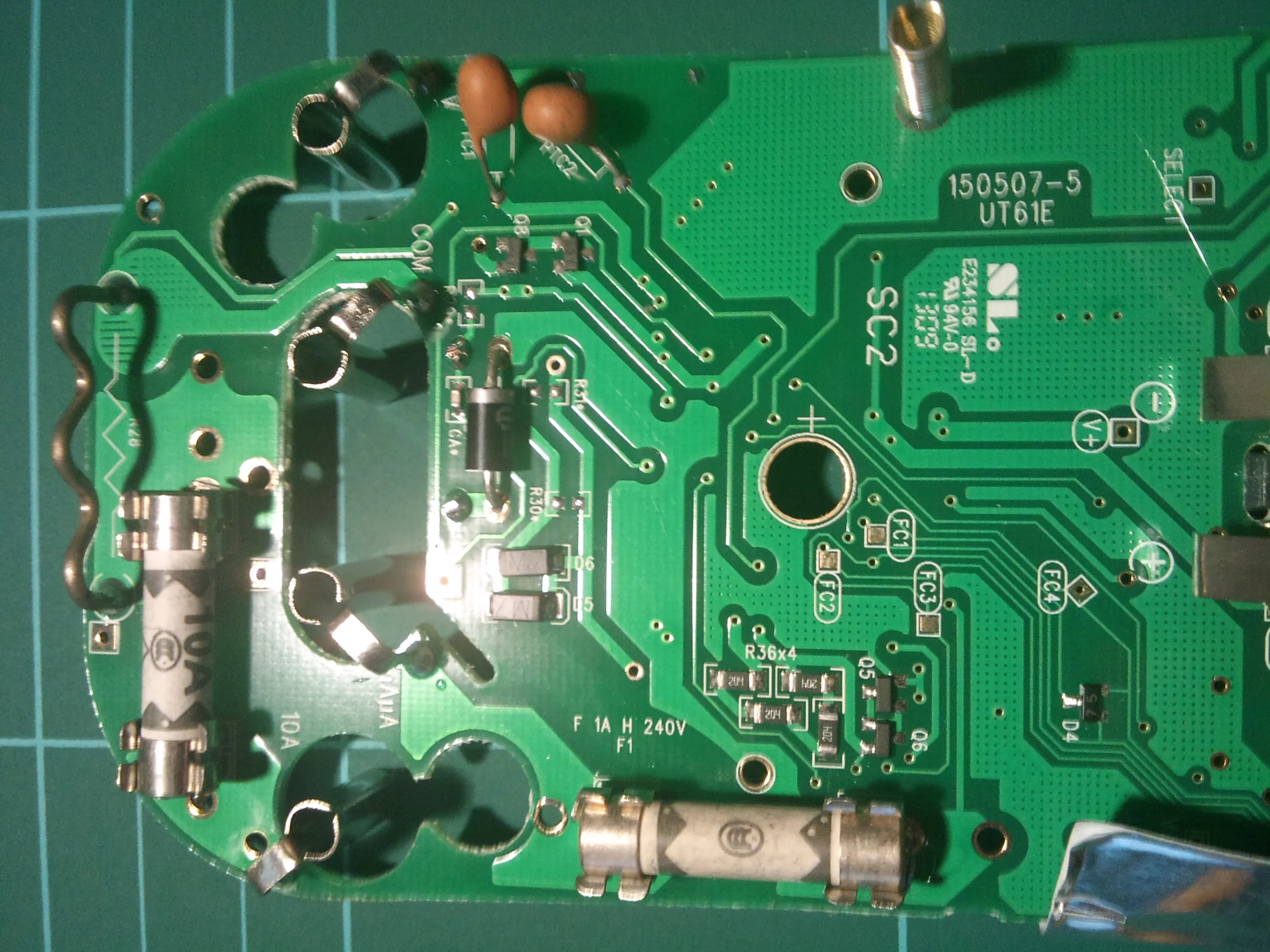
PS: Die serielle Ausgabe ist durch das Ziehen von Pin 111 auf Masse permanent aktiviert und lässt nicht auch nicht Abschalten. Höchstens das Durchtrennen der Leiterbahn um Pin 111 würde Abhilfe schaffen.
Das volkszaehler.org Projekt nähert sich mit großen Schritten seiner ersten stabilen Version und damit dem ersten Release.
Ich möchte hier nur einen kurzen Überblick über den aktuellen Stand geben. Du kennst das Projekt noch gar nicht? Weiß nicht was Smart-Meter sind? Da steigst du besser auf unsere Projekt Website ein!
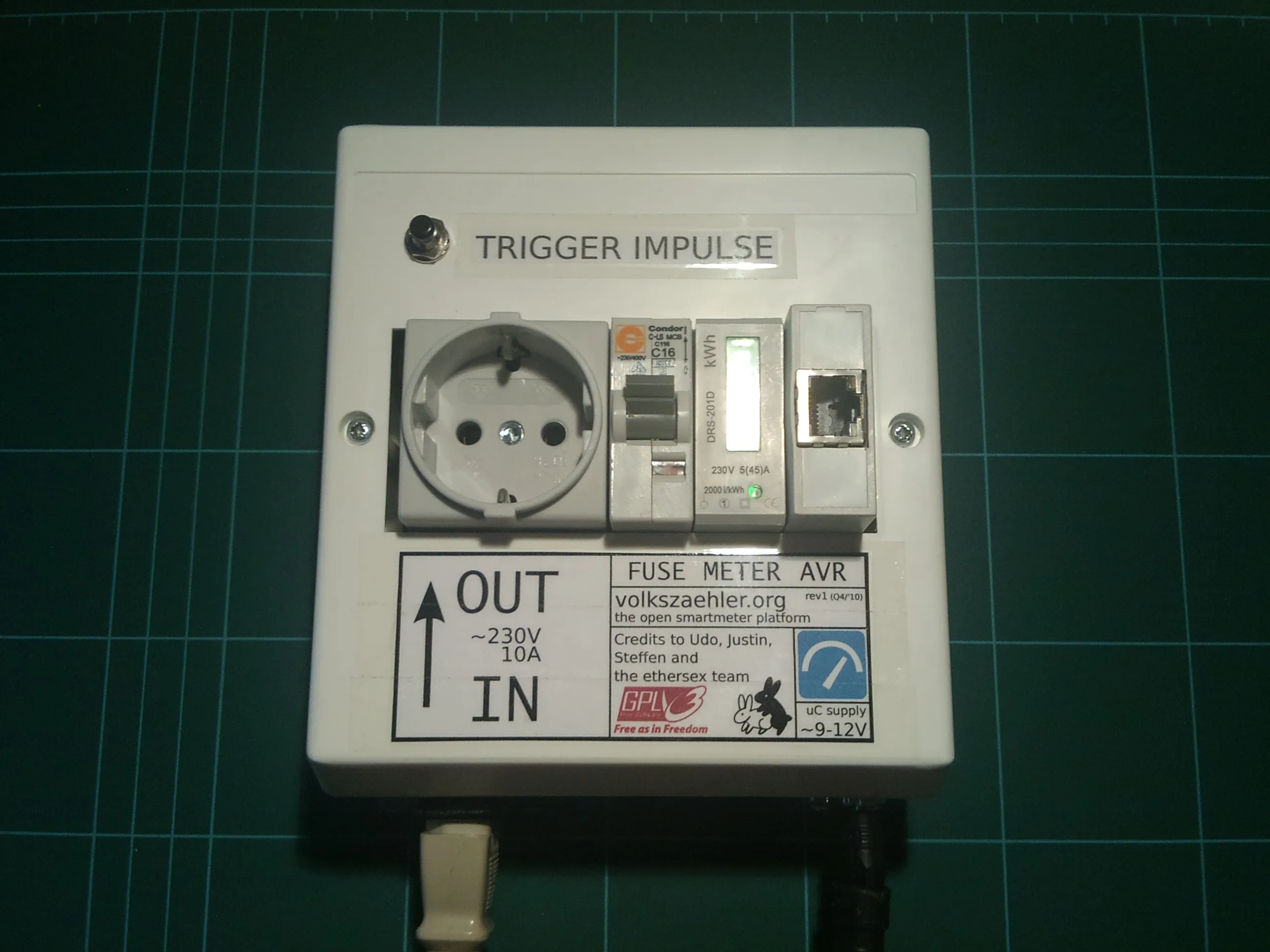
Für die Entwicklung am Projekt habe ich mir eine kleine Hutschienenbox gebaut. Sie eignet sich perfekt für den mobilen Einsatz und zum Testen neuer Firmware und Funktionen. Mal schnell den Verbrauch des eigenen Kühlschranks zu erfassen ist kein Problem. Derzeit ist mein Schreibtisch an die Box angeschlossen und liefert so aktuelle Daten für die Demo Installation des Projektes.
Die Box enthält folgende Komponenten:

Kurz vor Weihnachten beendeten wir unser Erstsemester Projekt “MATLAB meets LEGO Mindstorms” an der RWTH Aachen.
Während dieser Pflichtveranstaltung sollten wir die Lerninhalte der Vorlesung “Mathematische Methoden der Elektrotechnik” durch Steuerung von LEGO Mindstorms NXT Robotern unter MATLAB vertiefen. Das Projekt ist eine Pflichtveranstaltung im ersten Semester meines Studienganges (Elektrotechnik, Informationstechnik und Technische Informatik) und wird durch alle Lehrstühle unserer Fakultät als 10-tägige Blockveranstaltung vor Weihnachten durchgeführt.
Ich wurde dem Institut für vernetzte System (MOBNETS) zugeteilt. Etwas verwundert war ich dann am ersten Tag, als wir auf Englisch begrüßt wurden. Aber naja, später werden wir vermutlich sowieso dazu gezwungen werden.
Während der ersten Woche lernten wir die eigens für das Projekt entwickelte “RWTH Mindstorms NXT-Toolbox” kennen und haben an einigen vorgegebenen Versuchen gearbeitet.
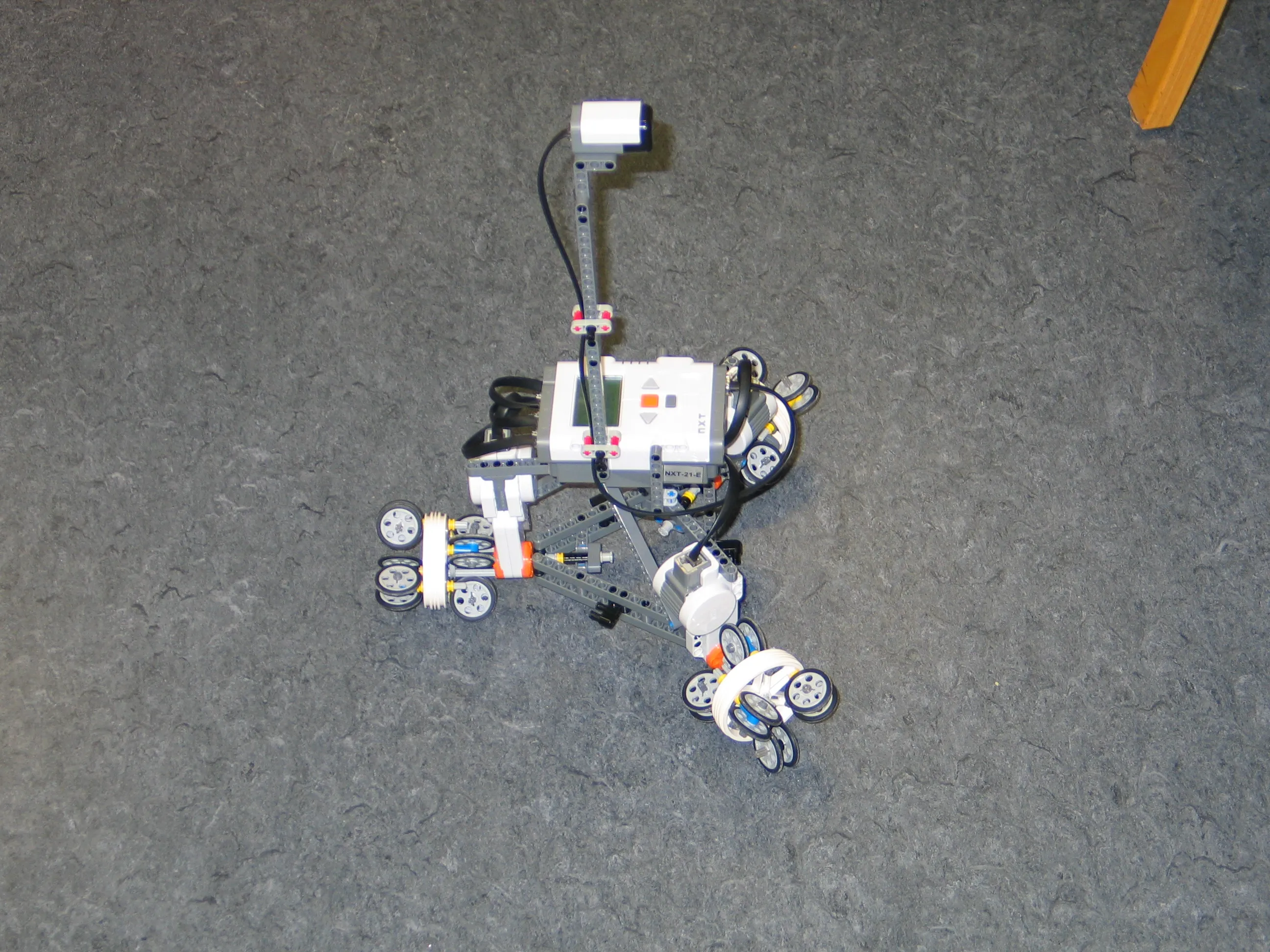
In der zweiten Hälfte des Projektes durften wir dann in einem Wahlversuch selber kreativ werden und einen eigenen Roboter konstruieren.
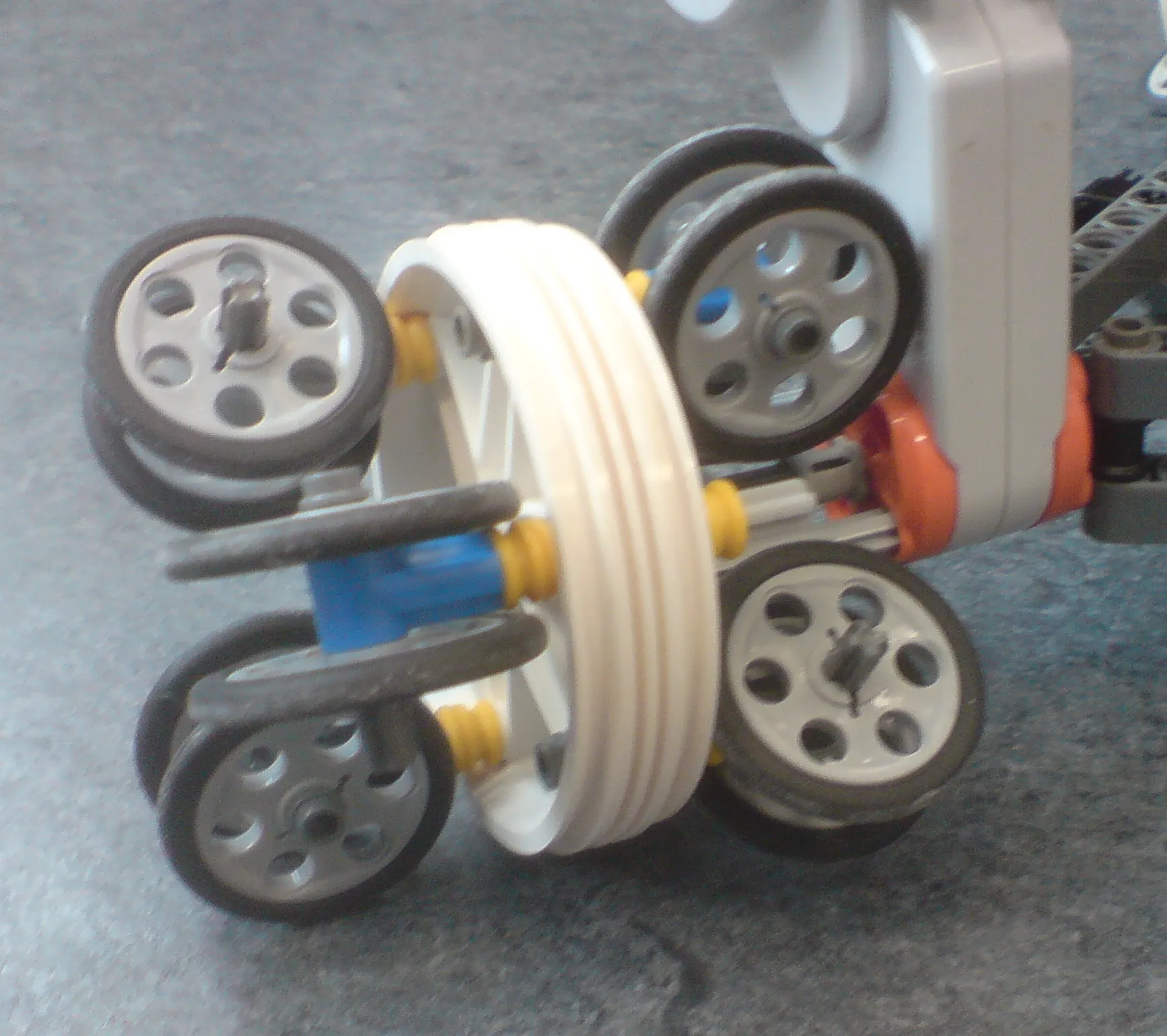
Meine beiden Kollegen und ich haben uns für einen Roboter mit omni-direktionalem Antrieb entschieden. Das Prinzip dieses etwas außergewöhnlichen Antriebes wird das folgende Video deutlich.
Die Konstruktion der “Omniwheels” war komplizierter als Anfangs angenommen. Dafür sind wir glücklicherweise recht schnell auf den nötigen Zusammenhang zwischen Fahrtrichtung und den drei Motorgeschwindigkeiten gekommen.
Als Projektabschluss mussten alle Gruppen ihren Roboter präsentieren. Unsere Präsentation gibt es hier: